Explore the seas
Time-of-Flight camera for underwater applications
Separately to airborne or land based systems, vision applications that operate in underwater or subsea environments pose unique challenges, yet can provide substantial value to end users. Below a shallow surface region, the absence of natural light typically requires the use of dedicated light sources. Often underwater environments are muddy or turbid, containing many small particles which scatter light and reduce the effectiveness of any illumination used. The absorption of visible light by water also reduces the overall light captured by a camera, resulting in low contrast images and a reduced range of visibility. In addition to the optical considerations, hardware must be designed to cope with high pressures and corrosive seawater.
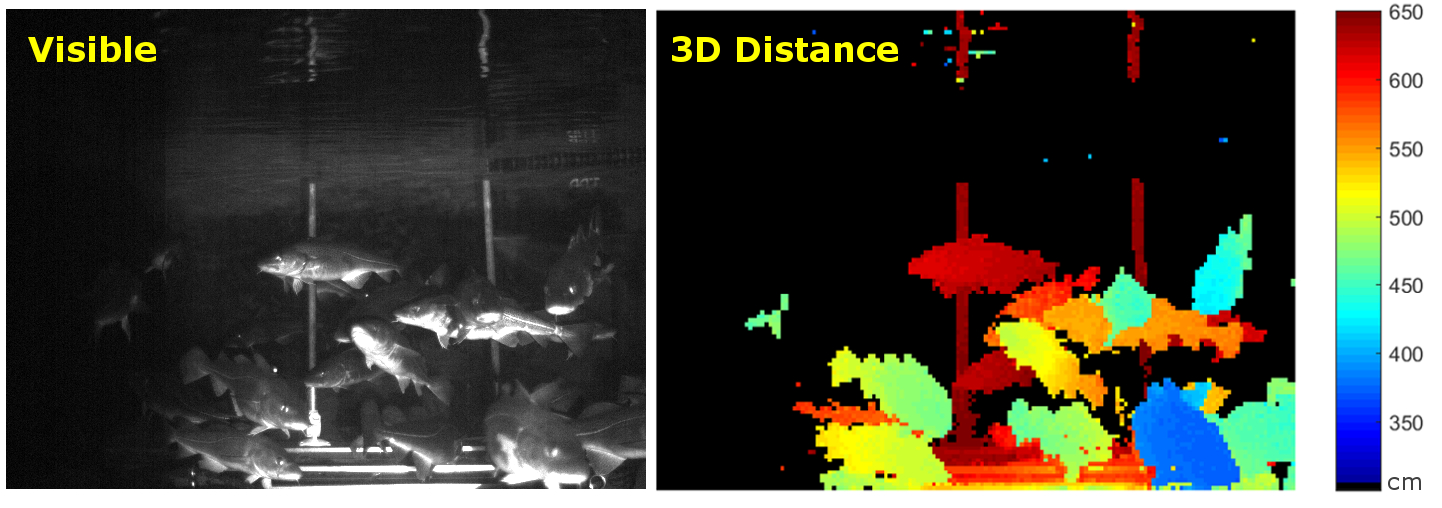
Bild 1: 3D reconstruction and intensity image of Atlantic cod swimming in a tank during system tests at DTU Aqua, Dennmark. (Bild: Odos Imaging Limited)
Under the EC Horizon 2020 framework, the Utofia consortium (www.utofia.eu) has been assembled to leverage state-of-the-art imaging, illumination, and processing to provide a new vision platform for subsea operation. The project has recently delivered the first iteration of a series of three prototype underwater cameras, each of which are capable of deployment in real environments, and spanning the steps to a first commercial product. End user applications are many and varied, including the automated measurement of fish growth in commercial fish farms, as well as the surveying and mapping of the seabed, and inspection of civil structures such as dams and bridge foundations. The technical foundation for the project is the adaption of range-gating and time-of-flight (ToF) techniques to the underwater environment, allowing the system to capture high-contrast images in turbid situations and also supply 3D information to users.
Range-gated images
Range-gating is a technique where pulses of light are used to illuminate a scene, similar to a conventional camera flash, but synchronized with the exposure period of the camera. With precise timing, and only opening the camera exposure after the pulse has been emitted, the camera will only capture light reflected from objects further away than a certain distance from the camera. In effect, different ’slices‘ of the scene are imaged with each slice corresponding to a different distance from the camera. This principle can be used to either remove the effects of scattered light, or extract 3D information from the scene. Key requirements for range-gating are a pulsed light source and precise control over the relative timings of the illumination pulses and the camera exposure, together with very fast, global ‚gating‘ of the image sensor. Within the Utofia project OEM laser specialist Bright Solutions has developed a new class of low-jitter active Q-switched lasers, which are combined with a 1.3MP ToF camera from Odos Imaging. This combination of hardware provides nanosecond pulses of green light at very high powers and fast repetition rates, whilst the ToF camera has been adapted to operate in a range-gating mode, both controlling the laser emission and perfectly synchronizing the exposure time. The fast repetition rates of the laser are combined with high-speed gated capture by the camera, allowing the storage of entire sequences of range-gated images within onboard memory. By capturing a complete sweep of different time gates a 3D snapshot of the scene can be reconstructed. Specific algorithms have been developed by the project coordinator Sintef which process the raw range sweeps to extract distance information. Initially developed to run on a control PC, these algorithms are currently being embedded directly within the camera’s central FPGA processing unit to allow real-time underwater 3D reconstruction.
Positive first results
Early tests during deployment with the first UTOFIA camera system have produced positive results, with the system providing both improved contrast in turbid situations, as well as robust 3D reconstruction. Very efficient rejection, by the camera, of back scattered light within the first meter, where the scatter is strongest, has been demonstrated using range-gated operation. Side by side comparisons with conventional cameras, have shown that the range-gating approach at least doubles the effective range of visibility when scattering is present. The algorithms developed with the project have produced a 3D reconstruction with centimeter scale resolution demonstrated at a distance of several meters. This level of precision is easily sufficient to estimate fish sizes with greater accuracy than is currently achieved today, as well as being suited to surveys of the seabed. Importantly, it has been found that the quality of 3D reconstruction is dependent on well-defined camera pixel responses, with each pixel ideally providing an identical and linear response to the reflected light.
Outlook

Bild 2: The UTOFIA underwater camera system assembled by SINTEF, Norway, showing housing and internal components. (Bild: Odos Imaging Limited)
The first outcomes of the UTOFIA project are showing real promise for enhanced underwater imaging, and future development within the project are expected to push the envelope of operation further. New ToF image sensor chips, developed within the project, are planned for integration into the system during 2017, providing different variants of the ultimate product, together with capabilities to suit specific applications. Beyond the operation in underwater scenarios, the technology has extensions to other complex imaging situations, such as dusty and dirty manufacturing processes, or in extremes of weather where fog, rain, or snow make unassisted imaging impossible.