Grün/blau statt IR
ToF-Kamera für Unterwassereinsätze oder im Stahlwerk
Meist finden ToF-Kameras dort ihren Einsatz, wo junge Menschen vor Bildschirmen herum hüpfen und wild gestikulieren, um eifrig in einer virtuellen Welt Punkte zu sammeln. Mit steigender Geschwindigkeit zieht diese Technologie auch in andere Anwendungsbereiche ein, wie z.B. der berührungslosen Interaktion in Autos oder OPs sowie für verschiedenste Automatisierungsaufgaben wie das Zählen, Klassifizieren und Verfolgen von Objekten. Ein ToF-System mit grün/blauer Beleuchtung ermöglicht jetzt neue Anwendungen.

Bild 1: Die ToF-Kamera in wasserfestem Gehäuse: Der 3D-Sensor verbirgt sich hinter dem gelben Block unter dem Bandpassfilter, links oben sind zwei LED-Emittermodule. (Bild: VoXel Interaction Design)
ToF-Kameras sind aktive Systeme, welche die Umgebung mit moduliertem Licht bestrahlen und aus dem aufgenommenen Antwortsignal pro Pixel eine Phasenverschiebung und daraus die Distanz berechnen. Um Menschen durch die Beleuchtung nicht zu stören, werden dabei LED-Arrays eingesetzt, die im nahen Infrarot strahlen (840 oder 950nm), welches für das menschliche Auge unsichtbar ist. Gleichzeitig werden die Sensor-Chips mit Bandpass-Filtern gegen Streulicht anderer Wellenlängen abgeschirmt. Die Sensorpixel selbst sind sind mit einem CMOS-Verfahren realisiert und daher nicht nur in Bereich des nahen Infrarot sensitiv, sondern können mit abgestimmten LEDs und Filtern auch mit anderen Wellenlängen betrieben werden – je nach Chip mit abnehmender Empfindlichkeit bis ins blaue (450nm).
Grün/blaue Beleuchtung
Benutzt man eine Kamera mit derart kurzen Wellenlängen, lassen sich bisher problematische Anwendungsfelder erschließen: Wasser beispielsweise absorbiert infrarotes Licht besonders gut. Handelsübliche ToF-Sensoren sind dort bis maximal 15cm einsetzbar, während eine Kamera mit blauer Beleuchtung problemlos Distanzen von drei Metern und mehr vermessen kann. Mit einem Prototypen wurde eine Kamera umgesetzt, die sowohl mit grüner als auch blauer Beleuchtung betrieben werden kann, denn in diesem Wellenlängenbereich ist Wasser besonders durchsichtig. Im Zuge der Entwicklung wurde nicht nur die Distanzberechnung adaptiert – bedingt durch die geänderte Lichtgeschwindigkeit unter Wasser – sondern auch eine flexible Rückprojektion aus den Polarkoordinaten der Kamera in ein euklidisches 3D-Modell das unterschiedliche Luft-Wasser-Übergänge wie flache Sichtfenster oder Bullaugen berücksichtigt. Ähnlich zeigt sich das Bild wenn zu viel Infrarot im Spiel ist: Die Überwachung von Brennvorgängen wie glühender Kohle oder das Detektieren von Schadstellen in heißen Schamottierungen ist mit NIR-Kameras nur schwer realisierbar da die Sensorpixel durch die vorhandene Infrarotstrahlung schnell überbelichten. Bei Aufnahmen in einem kurzwelligen Spektralbereich lässt sich das Störsignal minimieren, wodurch auch das Tracking heißer Objekte umgesetzt werden kann. Bei geeigneter Wahl der Beleuchtung ließe sich das System auch in der Automation von Erntemaschinen einsetzen: Neben der Distanzinformation, könnte eine Amplitudenauswertung eine bessere Abgrenzung zwischen Frucht, Blättern und Boden ermöglichen, wenn sich das Absorbtionsverhalten entsprechend unterscheidet. Bei wenig Restlicht ließe sich auch durch das Mischen mehrerer Farben eine native multispektrale 3D-Kamera realisieren.
Getrennter Sensor und Beleuchtung
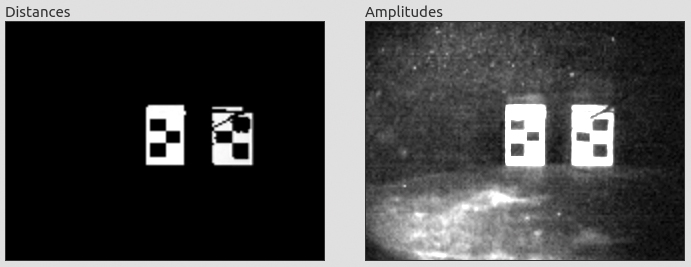
Bild 2: Aufnahme aus dem Messkanal (Entfernung Test-Target 3m): Im Distanz- und Amplitudenbild sind sowohl das Target, als auch interne Reflektionen an der Wasser-Luft-Grenzfläche zu sehen. (Bild: VoXel Interaction Design)
Der Kameraprototyp wurde gemeinsam mit Bluetechnix auf einer bestehenden Hardware-Architektur aufgebaut. Dank eines ARM-Prozessors mit vier Kernen lassen sich komplexe Applikationen lokal umsetzen. Das eingesetzte Software-Framework ermöglicht einen rasche Parametrisierung und Erweiterung auf spezifische Anwendungsfälle, da es auf einem Datenfluss-basierten Filterkonzept basiert, das um eigene funktionale Blöcke erweitert werden kann. Neben dem voll integrieren System, ist eine zweite Variante in Aufbau, die es ermöglicht Sensor und Beleuchtung via Kabel 30cm getrennt zu verbauen, was Vorteile bei der Abschirmung von Streulicht bringt und eine bessere Integration in kleine Stauräume ermöglicht.









