Roboternavigation
Schnelle Roboterführung dank präziser 3D-Scanner
Bin Picking als Begriff für die Entnahme von zufälig platzierten Teilen ist bereits seit einigen Jahren bekannt. Dennoch gibt es nur wenige Unternehmen, die eine technologisch ausgereifte Lösung für dieses Problem haben. Einer der Hauptgründe ist die Integration mehrerer komplexer Bereiche wie Bildverarbeitung, Bahnplanung, Kollisionsüberwachung und Greiferdesign.
 Scannen und (b) lokalisieren von Objekten. Anhand der Daten erfolgt (c) die Bahnplanung des Roboters f?r die Teileentnahme. (Bild: Photoneo)")
Der Bin-Picking-Prozessablauf erfolgt in drei Schritten: (a) Scannen und (b) lokalisieren von Objekten. Anhand der Daten erfolgt (c) die Bahnplanung des Roboters für die Teileentnahme. (Bild: Photoneo)
Moderne Robotik ist in der Lage, auf Eingaben zu reagieren, und modular anpassungsfähig für Veränderungen. Roboter, die für das Bauteilhandling von Punkt A nach Punkt B (an einer genau definierten Stelle) programmiert sind, erfüllen diese Definition der modernen Robotik nicht. Eine große Anzahl von Aufgaben scheiterte in der Vergangenheit in erster Linie an der Qualität der Messergebnisse der 3D-Scanner. Für das Handling von zufällig platzierten Objekten auf Europaletten oder in Behältern (Bin Picking) ist die Qualität der Messergebnisse (z.B. Punktwolke) allerdings wichtig, denn diese bestimmen die Präzision der Handlingoperationen. Der zweite Faktor ist die Zeit, in der ein Arbeitsbereich gescannt wird, denn es gibt derzeit nur wenige Scanner auf dem Markt, die qualitativ hochwertige Scans im Bruchteil einer Sekunde bieten. Dabei geht es nicht nur um die Abnahme von zufällig platzierten Teilen auf Europaletten, in Behältern oder Schachteln, sondern auch um Objekte, die auf einem Förderband nicht orientiert sind. Die intelligente Erkennung von Objekten und deren Handling ist auch notwendig für die Entladung zufällig platzierter Behälter und Schachteln auf Paletten. Bin-Picking-Anwendungen haben nichts mit der klassischen Robotik zu tun. Der Roboter dient hierbei lediglich als Werkzeug für die Entnahme von Objekten, ohne jede Logik. Der Prozessablauf erfolgt dabei in drei Schritten: Zunächst wird der Arbeitsbereich mit den Objekten durch einen 3D-Scanner gescannt. Die daraus generierte Punktewolke wird an die Lokalisierung weitergegeben. Diese lokalisiert, unter Verwendung des CAD-Modells, ein geeignetes Objekt zur Entnahme. Zeitgleich berechnet es den idealen Weg für den Roboter, bei dem dieser sich dem vorgegebenen Objekt nähert, ohne dass es zu einer Kollision kommt.
Roboterführung
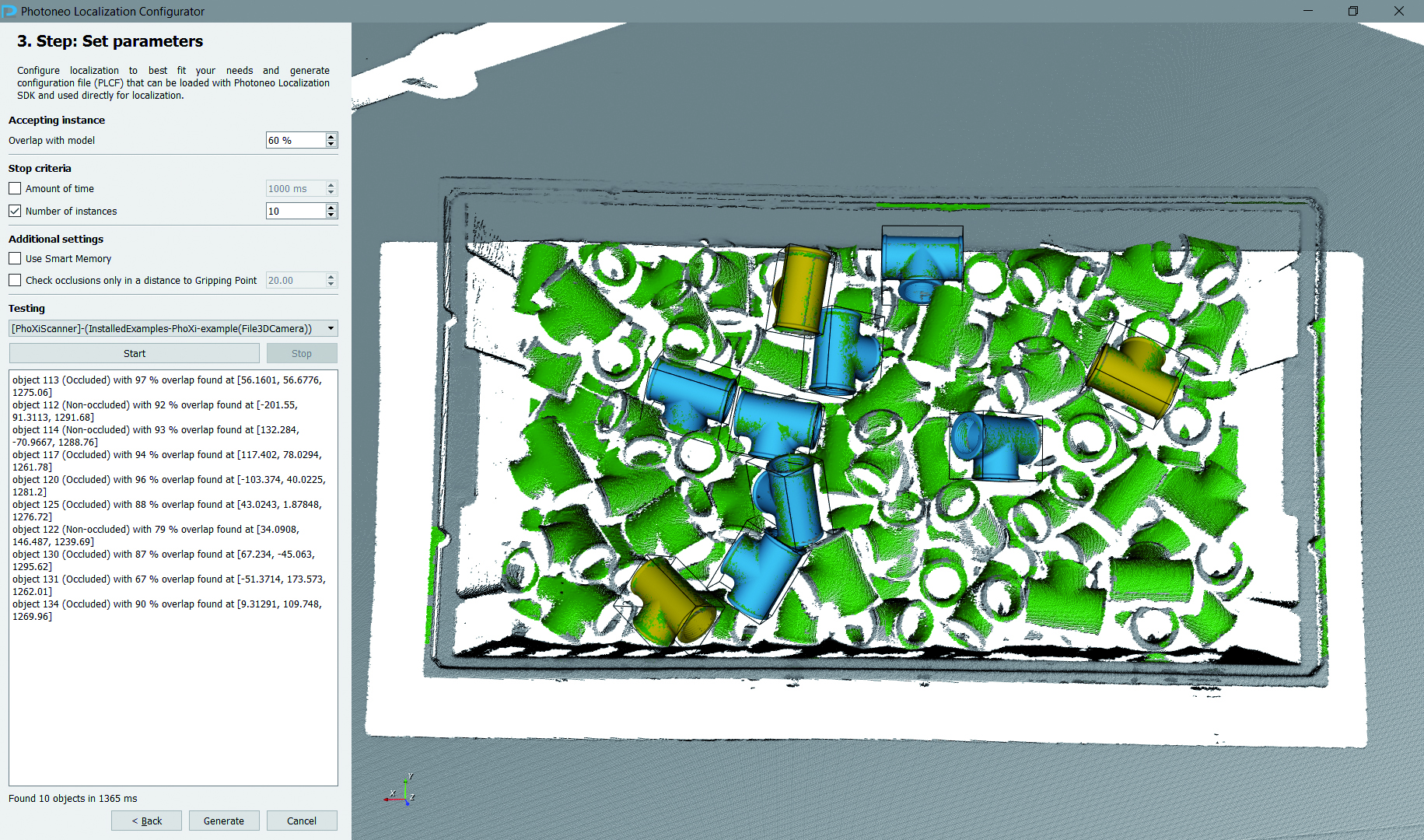
Bild 2: Vorschau von Lokalisierungs-Paketen: Auf der Basis von CAD-Modellen lokalisieren wir Teile in der Szene und erhalten Koordinaten der ausgewählten Punkte im Roboter-Koordinationssystem. (Bild: Photoneo)
Die kommenden Jahre werden neue Trends in der Robotik und Roboterführung bringen. So muss der Roboter in der Lage sein, auf veränderte Outputs, Produkte und Bewegungen der Menschen reagieren zu können. Moderne Robotik muss in einer sich ständig verändernden Umgebung funktionieren, nicht nur wegen der zunehmenden Möglichkeiten der Produktanpassung und der damit verbundenen Variabilität der Fertigung, sondern auch wegen der Weiterentwicklung der kollaborativen Robotik. Künftige Arbeitsumgebungen, in denen Menschen mit Robotern zusammenarbeiten, sind viel stärker als bisher auf funktionierende Bildverarbeitungssysteme angewiesen und müssen nicht nur unterschiedliche Produkte, Teile und Werkzeuge erkennen, sondern auch die Bewegungen des Menschen überwachen. Eine dynamische Regelung des Roboters muss dabei in jedem Augenblick gewährleisten sein, sodass es keinen Kontakt mit dem Menschen gibt.
Online Bin-Picking-Simulator
Bild 3: Der 3D-Scanner PhoXi ist für die Erfassung statischer Szenen konzipiert und bietet hochwertige Scans in kurzer Zeit, dank eines speziellen Algorithmus. (Bild Photoneo)
Diese Trends unterstützt Photoneo mit seinen Produkte. So liegen die Alleinstellungsmerkmale des PhoXi 3D-Scanners in den verwendeten Algorithmen. Der Scanner ist für die Erfassung statischer Szenen konzipiert und bietet hochwertige Scans in kurzer Zeit. Die Serie besteht aus fünf Modellen, die sich durch die Größe ihres Scanvolumens unterscheiden. Die patentierte Technologie des ‚3D-Scannens in der Bewegung‘ ist in der Phoxi 3D-Kamera integriert, die einen eigenen CMOS verwendet und noch dieses Jahr eingeführt wird. Hauptvorteil der Kamera ist ihre hohe Auflösung bei Scangeschwindigkeiten bis zu 30fps. Auf der Softwareseite bieten die slowakische Firma eigene Algorithmen zur Lokalisierung von Objekten und für die Bahnplanung von Roboterbewegungen an. Ziel ist es, eigene Software-Tools zu entwickeln, mit denen Kunden ohne Bildverarbeitungserfahrung alleine durch die Änderung weniger Parameter eine Bin-Picking-Anwendung einrichten können. Der Online Bin-Picking-Simulator hilft dabei auf Basis eines CAD-Modells, die Entnahme von Bauteilen mit realen physikalischen Bedingungen zu simulieren. Somit können Kunden den Greifer online vom Büro aus testen, ganz ohne lange Entwicklungsprozesse oder mechanische Tests.









