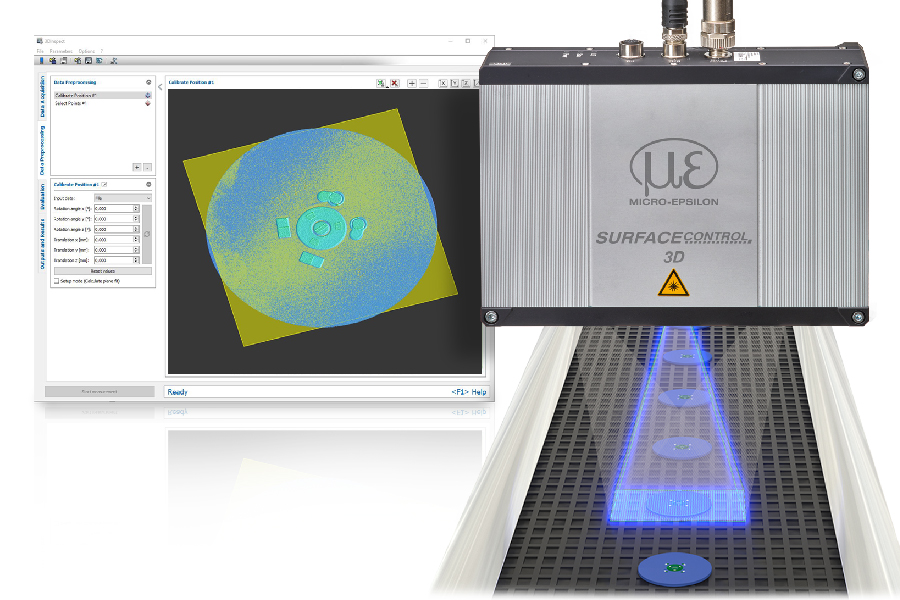
Durch die Simulation neuer Bauteile und Prozesse einer Robotikanwendung lassen sich Entwicklungszeit und Kosten einsparen. (Bild: IDS Imaging Development Systems GmbH)
Taktzeiten verbessern
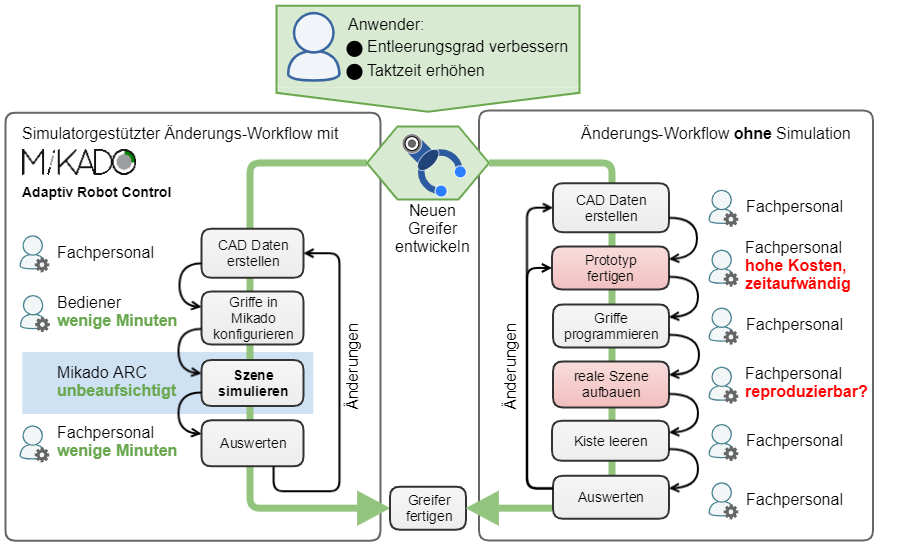
Auch die Umrüstung einer Bin-Picking-Anwendung auf neue Teile bzw. eine Verbesserung der Taktzeiten oder des Entleerungsgrads der verwendeten Teilebehälter unterstützt die adaptive Robotersteuerung Mikado ARC durch den Simulator-gestützten Workflow. Durch Verwendung von 3D-Daten der Kameras und CAD-Daten neuer Bauteile und Greiferprototypen erstellt der Mikado ARC Controller eine realitätsnahe, virtuelle Simulation der Greifsituation. Mithilfe der virtuellen Kameratechnik mit integrierter Physik-Engine lassen sich auch die Behälter mit virtuellen Teilen synthetisieren und in beliebiger Anzahl zufällig befüllen. Damit können Griffvariationen oder auch neue Greifer virtuell ausprobiert werden. Die Auswertung der Simulation ermöglicht verlässliche Vorhersagen über Taktzeiten und den erreichbaren Entleerungsgrad der Boxen. Basierend auf diesen Simulatorergebnissen können die CAD-Daten eines neuen Greiferentwurfs solange verbessert werden, bis die Vorgaben erreicht werden. Die zeit- und kostenintensive Fertigung von Prototypen ist damit nur einmal vor der realen Inbetriebnahme am Roboter notwendig.
Fazit
Die Inbetriebnahme und Anpassung von Bin-Picking-Anwendungen kann mit der Robot-Vision-Komplettlösung Mikado ARC von Isys Vision einfach, schnell und kostensparend durchgeführt werden. Sie bringt Flexibilität in die Produktionslinie und erlaubt zudem eine effiziente Automatisierung im Prototypenbau und Kleinserien. Anwender können dem Roboter in kurzer Zeit, auch ohne Spezialwissen, viel Neues beibringen.Teilewechsel nimmt ein Maschinenbediener ohne Programmieraufwand in wenigen Minuten selbst vor. Zudem lassen sich mit den neuen Simulationsmöglichkeiten Stillstandzeiten und Rüstkosten reduzieren. Die adaptive Robotersteuerung verfügt zudem über eine direkte Anbindung an Maschinensteuerungen mittels Industrieprotokollen wie Profinet oder OPC-UA.