Pure Spectra
Hyperspectral Imaging with True Image Pixels
A new type of hyperspectral camera that differs from conventional pushbroom scanners will be released at Q1/2018. It takes frames with true image pixels and even 5nm sharp spectral resolution. Exact geometrical measurements and 3D-models are now enabled together with real hyperspectral information. In addition, data processing is possible already in the camera thanks to embedded Linux.
 Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging Remote Sens. 2017, 9(3), 185; doi:10.3390/rs9030185 (Bild: Senop Oy)")
Figure 1 | Example of tree species detection from UAV. (Courtesy of Olli Nevalainen – National Land Survey of Finland – et al,) Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging Remote Sens. 2017, 9(3) (Bild: Senop Oy)
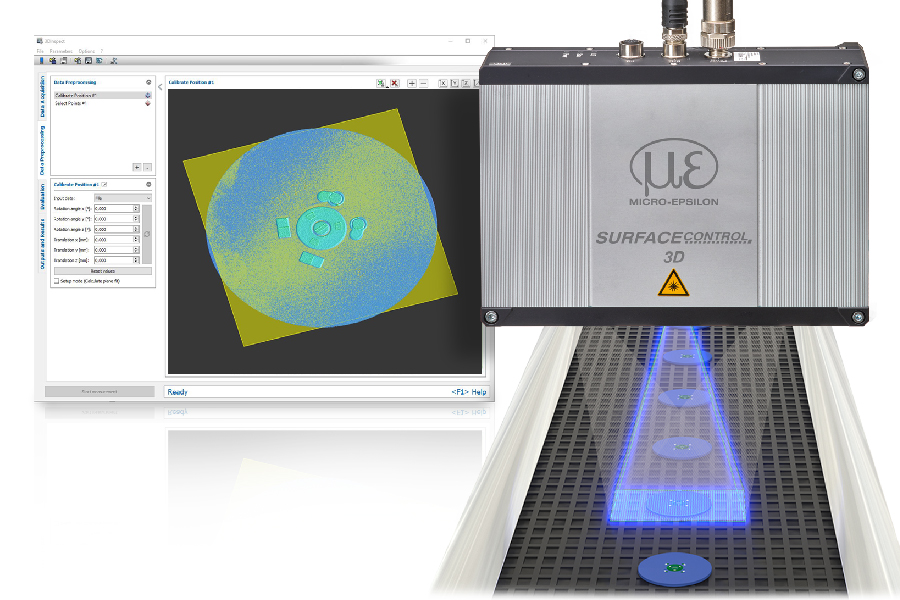
Conventional hyperspectral technologies are based on what is called pushbroom technology that takes images of lines, not frames. The 2D images are formed by stitching together these lines when either the camera is moving or the object is moving under the camera. In this approach, the stitching of lines is very challenging when the camera is used as a handheld device or in unstable platforms. The new camera adds new dimension for this issue, with every image now being in 2D after exposure without line scanning. This feature opens up totally new applications, and the camera has already proven its power in UAVs, laboratories and in the field as a handheld device. The 2D images are easy to stitch with each other even when the platform is moving. In addition, the frame approach enables 3D digital model construction when object is seen or illuminated from different directions.
Programmable bands
The heart of Senop’s camera is an extremely fast tunable Fabry-Perot filter that passes through certain wavelength at a time depending on the user settings. The maximum speed is up to 200bands/s, enabling video rate multispectral imaging for inline applications. The camera offers up to 400 bands with down to 5nm FWHM over the VNIR range. However, the amount of bands and their peak wavelengths are fully programmable. Despite the huge amount of flexibility for wavelength choice, this special feature means less useless data for processing that keeps the system speed high but the size and cost low. Only relevant wavelengths are measured. This way the camera can be thought of as 100 multispectral cameras in one device. The current camera is designed for VNIR wavelength range, but other wavelength range devices are being planned in the coming years. The new technology can be easily used for all ranges from UV, VNIR, SWIR, MWIR to even LWIR.
True image pixels

Figure 2 | The spectrum is pure without disturbance from other orders or bands (left). Measurement comparison to Argon peak (right). The peak wavelength is accurate. (Bild: Senop Oy)
In RGB or similar filter on chip images, most of the pixels may have been calculated, that is interpolated. This may cause inaccuracy for the measurements if the amount of interpolation increases too high. In the new camera every pixel is true image pixel, meaning every pixel is measured not interpolated. Another important thing in spectroscopical measurements is the intensity relation between different bands. To ensure reliable measurements typical optical errors, such as lens fall-off (vignetting), should be corrected. Every camera is uniquely corrected against these features, and output can be treated as an absolute radiance over the whole image. For hyperspectral imaging the spectral quality and pureness is the key factor for industrial and scientific applications. The sharper and purer the spectrum, the more accurate and reliable the result. The high spectral quality together with flexibility in wavelength choice is the reason why hyperspectral cameras perform better than multispectral cameras. The passing wavelength in Senop’s camera is pure without disturbance from other orders or bands. Unwanted peaks are blocked physically by OD4 filters.
Embedded Linux
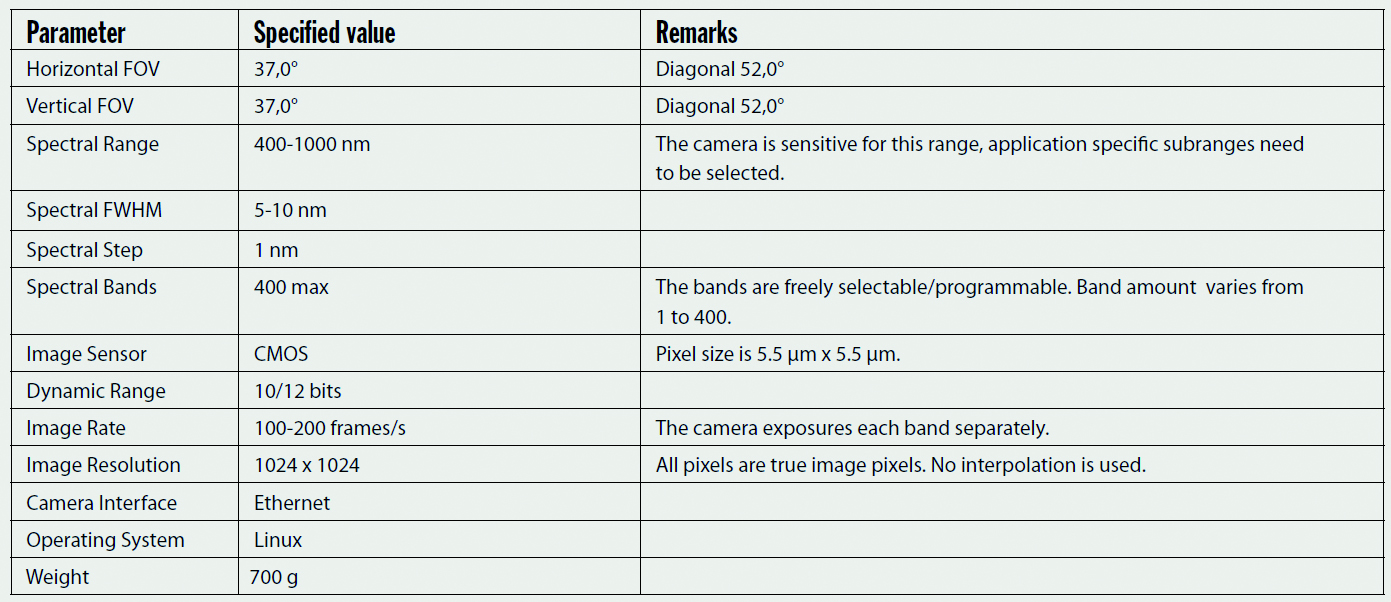
Figure 3 | The preliminary technical specifications of Senop’s new camera. Every pixel in is measured
as a true image pixel. No interpolation is used in image formation. (Bild: Senop Oy)
The amount of data has been the bottleneck for hyperspectral data processing flow in the past. The time for the data transfer has played a big a role in terms of system speed. Fortunately, this game will now change. When the data processing, or at least part of it, can be performed already in the camera. The time used before for the data transfer can be used now for data analysis or decision-making. The basic data output is intensity corrected images. However, depending on the application, it may be possible to analyze the data inside the camera, enabling analyzed images as an output via an ethernet cable. And when only a few wavelength bands are needed, the video stream with quantified information is visible.